機器人建設美好生活
科技創造未來
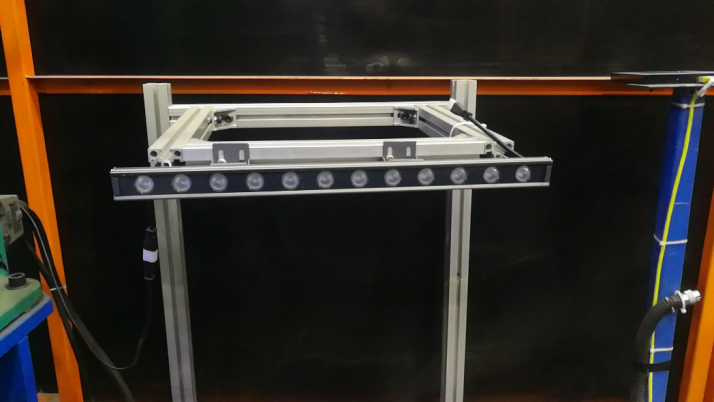
智慧焊接
智能焊接機器人系統
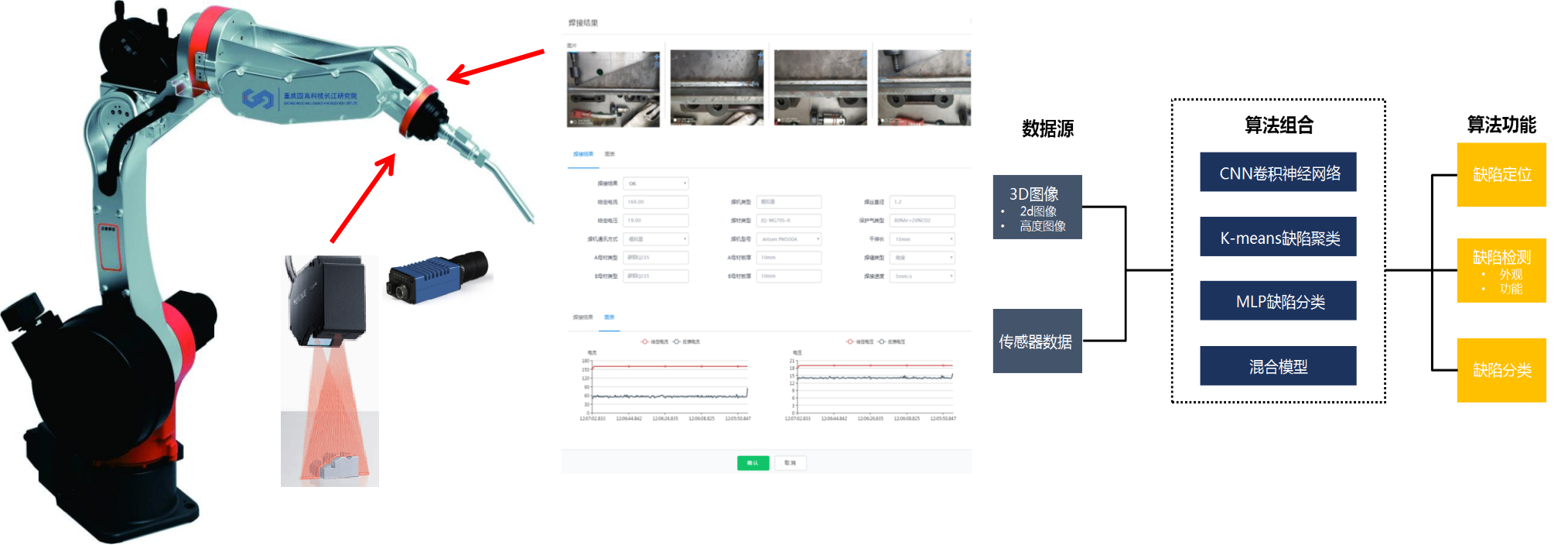
智能焊接機器人手眼系統
視覺系統主要包括相機、鏡頭、光源、控制器、圖像處理器、圖像處理軟件MVS等
實現原理
智能焊接機器人系統通過視覺與機器人之間進行標定,建立與機器人的運動關系,視覺進行特征點抓取定位后,將所得到的坐標信息傳輸給機器人進行焊接。
機器人將視覺傳送的圖像坐標轉換成機械坐標后,回傳給視覺,視覺進行運算處理后將焊接點位發送給機器人,機器人完成焊接。
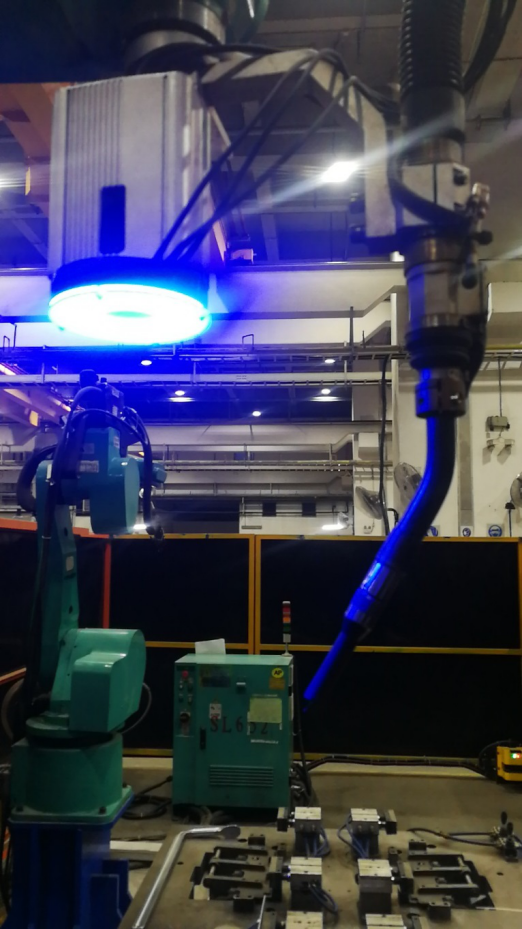
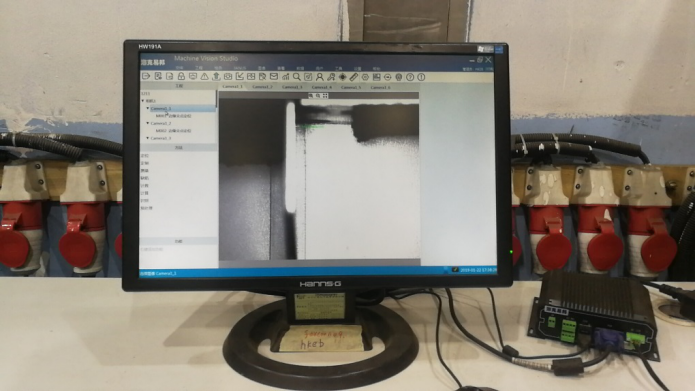
智能焊接自動化案例
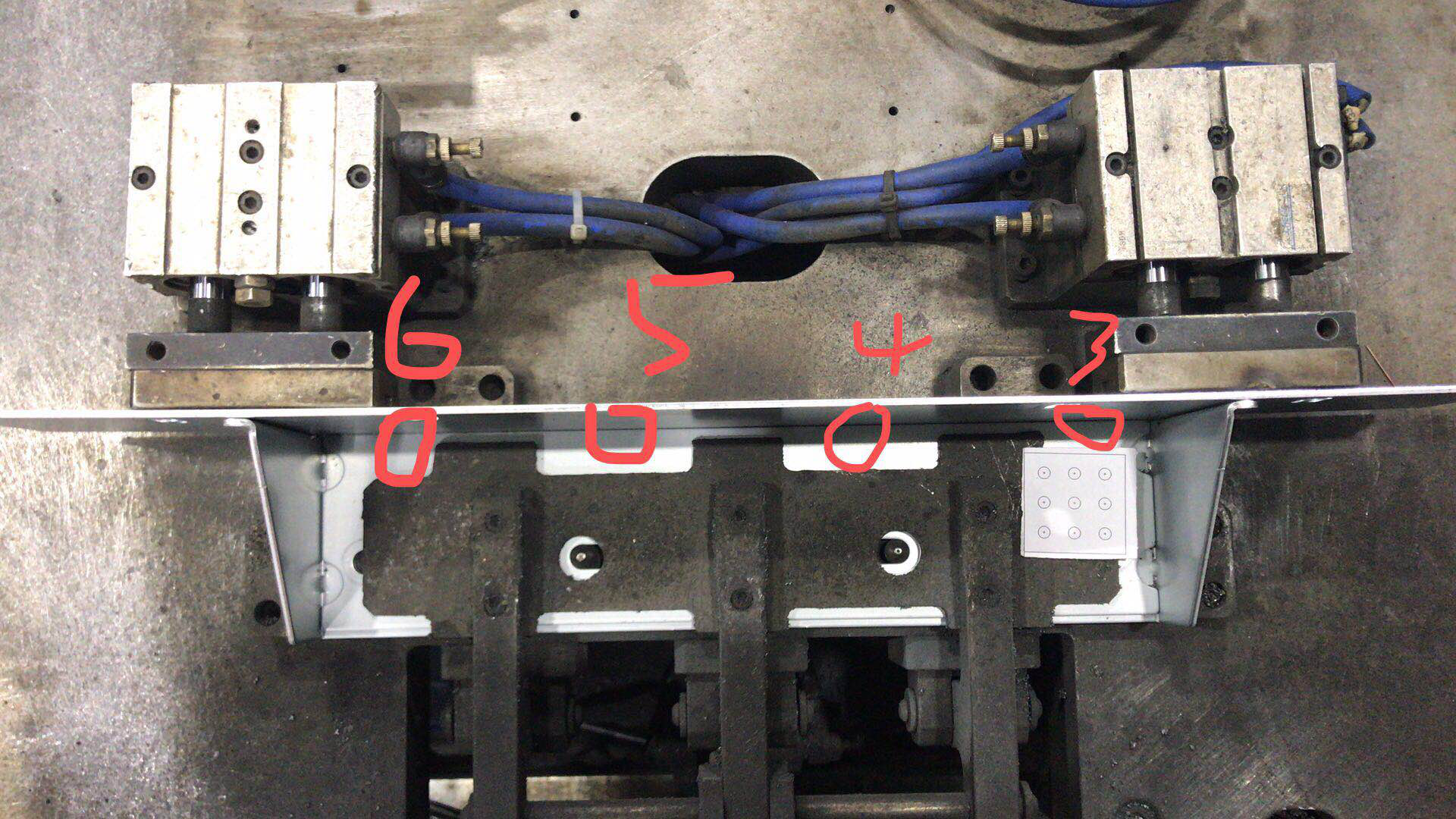
根據產品特性,制定相應的拍照方式,以便獲取到有效信息
工裝夾具和產品本身的原因,會導致產品內部固定板的高度發生變化
背板本身有彎曲,受到夾具的推力會發生形變
機器人示教方式進行焊接會出現焊槍對不準焊縫,產生不良品。
在水平方向進行①②號位置拍照提取特征點得到固定板的高度信息
在豎直方向進行③④⑤⑥焊接點位的拍照,進行焊縫間隙的調整,確保焊槍對準焊縫中心
通過6次拍照將內部固定板的高度信息與背板形變的焊縫寬度信息得到后,每一個工件的高度與形變情況都會不同,將實時數據的傳輸給機器人進行焊接工作,這樣就能夠做到焊接的精準與穩定。

目前狀況
數據傳輸穩定,視覺定位的內側4道焊縫經過多次焊接測試,偏差小于1mm

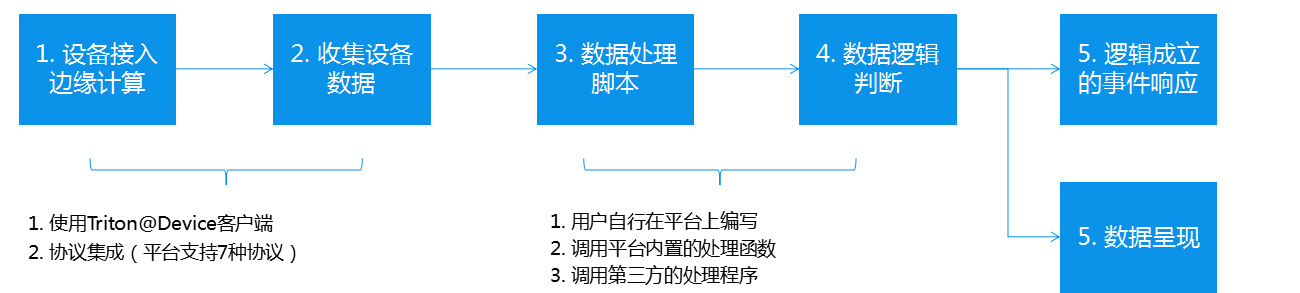
邊緣計算數據采集系統
在Janus中,設備從接入平臺到進行數據分析或呈現,一般路徑如下: